Эхолот для рыбалки своими руками
Эхолот для рыбалки своими руками
Самоделки из двигателя от стиральной машины:
1. Как подключить двигатель от старой стиральной машины через конденсатор или без него
2. Самодельный наждак из двигателя стиральной машинки
3. Самодельный генератор из двигателя от стиральной машины
4. Подключение и регулировка оборотов коллекторного двигателя от стиральной машины-автомат
5. Гончарный круг из стиральной машины
6. Токарный станок из стиральной машины автомат
7. Дровокол с двигателем от стиральной машины
8. Самодельная бетономешалка
Cамодельный мини-эхолот на микроконтроллере Atmel ATMega8L
и
ЖКИ от мобильного телефона nokia3310
Представляю вашему вниманию авторскую разработку – самодельный мини-эхолот на микроконтроллере Atmel ATMega8L и ЖКИ от мобильного телефона nokia3310. Устройство рассчитано для повторения радиолюбителем средней квалификации, но, я думаю, конструкцию может повторить каждый желающий. Материал я старался изложить так, чтобы читателям в доступной форме дать побольше полезной информации по теме. Надеюсь, что повторение конструкции принесет Вам много удовольствия и пользы.
Буду рад ответить на ваши вопросы/пожелания/замечания и помочь в повторении конструкции.
С уважением, Alex
Эхолот, сонар (sonar) — сокращение от SOund NAvigation and Ranging. Эхолот известен где-то с 40-х годов, технология была разработана во время Второй мировой войны для отслеживания вражеских подводных лодок. В 1957 году компания Lowrance выпустила первый в мире эхолот на транзисторах для спортивной рыбной ловли.
Эхолот состоит из таких основных функциональных блоков: микроконтроллер, передатчик, датчик-излучатель, приемник и дисплей. Процесс обнаружения дна (или рыбы) в упрощенном виде выглядит следующим образом: передатчик выдает электрический импульс, датчик-излучатель преобразует его в ультразвуковую волну и посылает в воду (частота этой ультразвуковой волны такова, что она не ощущается ни человеком, ни рыбой). Звуковая волна отражается от объекта (дно, рыба, другие объекты) и возвращается к датчику, который преобразует его в электрический сигнал (см. рисунок ниже).
Приемник усиливает этот возвращенный сигнал и посылает его в микропроцессор. Микропроцессор обрабатывает принятый с датчика сигнал и посылает его на дисплей, где мы уже видим изображение объектов и рельефа дна в удобном для нас виде.
На что следует обратить внимание: рельеф дна эхолот рисует только в движении. Это утверждение вытекает из принципа действия эхолота. Тоесть, если лодка неподвижна, то и информация о рельефе дна неизменна, и последовательность значений будет складываться из одинаковых, абсолютно идентичных значений. На экране при этом будет рисоваться прямая линия.
Первый вопрос, который, я уверен, возникнет у читателей «Почему использован такой маленький дисплей?» Поэтому я сразу на него отвечу: этот «мини-эхолотик» разрабатывался по просьбе знакомого из того, что оказалось под рукой. А этими подручными средствами оказались ATMega8L, дисплей от nokia3310 и какой-то излучатель с обозначением f=200kHz. Еще Вы, наверное, спросите возможно ли переделать программу/схему под другой, больший дисплей? Да. Теоретически это возможно.
От эхолотов, описанных в [1, 2, 3] моя конструкция отличается применением графического ЖК дисплея, что дает устройству преимущества в отображении полезной информации.
Вся конструкция собрана в корпусе «Z14». Питание обеспечивается от аккумулятора 9В GP17R9H. Максимальный потребляемый ток не более 30 мА (в авторском варианте 23мА).
Теперь о возможностях эхолота. Рабочая частота 200 кГц и настраивается под конкретный имеющийся излучатель. Программно реализована возможность измерять глубину до 99,9 метров. Но скажу сразу: максимальная глубина, которую сможет «видеть» эхолот, в большой степени будет зависеть от параметров примененного излучателя. Моя конструкция на данное время тестировалась только на водоеме с максимальной глубиной около 4 м. Прибор показал отличные результаты. По мере возможности постараюсь протестировать работу эхолота на более больших глубинах, о чем будет сообщено читателям.
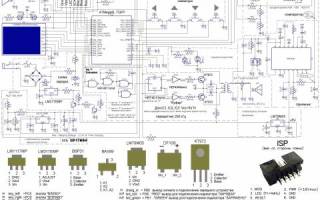
Итак, перейдем к схеме. Схема мини-эхолота показана на рисунке ниже:
Основные функциональные блоки эхолота: схема управления (тоесть микроконтроллер ATMega8L), передатчик, излучатель, приемник, дисплей, клавиатура, схема зарядки аккумуляторной батареи.
Работает эхолот следующим образом: микроконтроллер на выводе РВ7 формирует управляющий сигнал (прямоугольные импульсы лог. «0») длительностью примерно 40 мкс. Этот сигнал запускает на указанное время задающий генератор с рабочей частотой 400 кГц на микросхеме IC4. Далее сигнал подается на микросхему IC5, где частота сигнала делится на 2. Сигнал с IC5 подается на буферный каскад на микросхеме IC6 и далее на ключи Q3 и Q4. Далее сигнал со вторичной обмотки трансформатора Т1 подается на пьезокерамический датчик-излучатель LS2, который посылает ультразвуковые посылки во внешнюю среду.
Отраженный от дна/препятствия сигнал принимается датчиком-излучателем и подается на вход приемника, который собран на микросхеме SA614AD в типовом включении (см. Datasheet на SA614AD). Диодная сборка BAV99 на входе приемника ограничивает входное напряжение приемника в момент работы передатчика.
Сигнал с приемника подается на компаратор на микросхеме LM2903, чувствительность которого регулируется микроконтроллером.
Далее сигнал обрабатывается в микроконтроллере и отображается в нужном виде на графическом ЖК дисплее 84х48 точек.
Трансформатор Т1 передатчика намотан на сердечнике К16*8*6 из феррита M1000НМ. Первична обмотка наматывается в 2 провода и содержит 2х14 витков, вторичная – 150 витков провода ПЭВ-2 0,21мм. Первой мотается вторичная обмотка. Половины первичной обмотки должны быть «растянуты» по всей длине сердечника. Обмотки необходимо изолировать друг от друга слоем лакоткани или трансформаторной бумаги.
Теперь самая интересная и проблемная часть: датчик-излучатель. У меня эта проблема была решена изначально: у меня уже был готовый излучатель. Как быть Вам?
Вариант 1: приобрести готовый датчик.
Вариант 2: изготовить самому из пьезокерамики ЦТС-19.
При прошивке микроконтроллера ATMega8L fuse bits выставить согласно картинке ниже :
Полная информация по изготовлению, настройке, прошивке и руководству по использованию мини-эхолота
смотрите в прилагаемом архиве!
Эхолот для рыбалки своими руками
для этой схемы 
Основные функциональные блоки эхолота: схема управления (то есть микроконтроллер ATMega8L), передатчик, излучатель, приемник, дисплей, клавиатура, схема зарядки аккумуляторной батареи.
Работает эхолот следующим образом: микроконтроллер на выводе РВ7 формирует управляющий сигнал (прямоугольные импульсы лог. «0») длительностью примерно 40 мкс. Этот сигнал запускает на указанное время задающий генератор с рабочей частотой 400 кГц на микросхеме IC4. Далее сигнал подается на микросхему IC5, где частота сигнала делится на 2. Сигнал с IC5 подается на буферный каскад на микросхеме IC6 и далее на ключи Q3 и Q4, нагрузкой которых является трансформатор Т1. Сигнал со вторичной обмотки трансформатора Т1 подается на пьезокерамический датчик-излучатель LS2, который посылает ультразвуковые посылки во внешнюю среду.
Отраженный от дна/препятствия сигнал принимается датчиком-излучателем и подается на вход приемника, который собран на микросхеме SA614AD в типовом включении (см. Datasheet на SA614AD). Диодная сборка BAV99 на входе приемника ограничивает входное напряжение приемника в момент работы передатчика.
Сигнал с выхода приемника подается на компаратор на микросхеме LM2903, чувствительность которого регулируется микроконтроллером.
Далее сигнал обрабатывается в микроконтроллере и отображается в нужном виде на графическом ЖК дисплее 84х48 точек.
Трансформатор Т1 передатчика намотан на сердечнике К16*8*6 из феррита M1000НМ. Первична обмотка наматывается в 2 провода и содержит 2х14 витков, вторичная – 150 витков провода ПЭВ-2 0,21мм. Первой мотается вторичная обмотка. Половины первичной обмотки должны быть «растянуты» по всей длине сердечника. Обмотки необходимо изолировать друг от друга слоем лакоткани или трансформаторной бумаги.
Теперь самая интересная и проблемная часть: датчик-излучатель. У меня эта проблема была решена изначально: у меня уже был готовый излучатель. Как быть Вам?
Вариант 1: приобрести готовый датчик.
Вариант 2: изготовить самому из пьезокерамики ЦТС-19 по технологии, описанной в [1-3] см. раздел «ссылки».
На место R143 впаиваем резистор 1,8 кОм, на место R141 – подстроечный резистор Rп сопротивлением 0,5..1кОм.
Подключаем питание (полностью заряженный аккумулятор или «крону»). Измеряем потребляемый ток: если он выше 30 мА – ищите ошибки в схеме. В моем экземпляре потребляемый ток в режиме «PAUSE» составлял 19 мА. Далее смотрим на дисплей: если Вы видите то, что показано на рисунке ниже – это значит, что собранная схема на 90% рабочая.
Теперь приступим к настройке остальных 10%. Отсоединяем батарею питания. Отключаем питание выходного каскада передатчика (выпаять R21). Отсоединяем выводы 1,2 микросхемы IC4 от вывода 8 (Port B7) микроконтроллера (выпаяв перемычку-переход возле ножки контроллера) и подключаем их на общий провод. Подключаем к выводу 4 IC4 частотомер и подаем на схему питание. Вращением ручки подстроечного резистора Rп устанавливаем частоту генератора равной двойной резонансной частоте вашего излучателя. То есть, если резонансная частота излучателя равна 200 кГц – то устанавливаем частоту генератора равной 400 кГц. Отсоединяем батарею питания. Отсоединяем выводы 1,2 IC4 от общего провода и впаиваем перемычку обратно. Подаем на схему питание и нажимаем кнопку «START». Подключаем осциллограф к выводу 8 микроконтроллера и убеждаемся в наличии управляющего отрицательного импульса длительностью примерно 45 мкС (смотрите осциллограмму ниже).

Подключаем осциллограф параллельно излучателю-датчику и убеждаемся в наличии зондирующих импульсов амплитудой не менее 75В. Если амплитуда меньше – значит проблема скорее всего в неправильной работе трансформатора (к.з., не «тот» сердечник, не подобрано нужное количество витков).
Далее в режиме «PAUSE» проверяем режим работы по постоянному току приемника сигналов на IC8 и компаратора на IC7 согласно карты напряжений. Напряжение на выводе 2 микросхемы IC4 должно быть больше напряжения на выводе 3 микросхемы IC4 на 30..80мВ, а если быть точнее – то на минимально необходимое для того, чтобы на выходе компаратора еще был лог. «0». В случае необходимости выставляем напряжение подбором номиналов R23..R25.
Нажимаем кнопку «START» и опускаем излучатель в сосуд с водой глубиной не менее 65см. Далее подключаем осциллограф к выводу 3 микросхемы IC7 и наблюдаем формируемые зондирующие импульсы и отраженный сигнал (смотрите осциллограмму ниже).

Ручкой подстроечного резистора Rп подстраиваем частоту задающего генератора передатчика по максимальной амплитуде отраженного сигнала (второй импульс на осциллограмме выше).
Отсоединяем подстроечный резистор Rп и измеряем его сопротивление. Подбираем такого же номинала резистор и впаиваем его на место R141.
Схема зарядки при правильном монтаже работает сразу и в наладке не нуждается.
На этом вся настройка мини-эхолота заканчивается. 

Эхолот рыболова-любителя своими руками.

Структурная схема, поясняющая устройство и работу эхолота, показана на рис. 1. Тактовый генератор G1 управляет взаимодействием узлов прибора и обеспечивает его работу в автоматическом режиме. Генерируемые им короткие (0,1 с) прямоугольные импульсы положительной полярности повторяются каждые 10 с. Своим фронтом эти импульсы устанавливают цифровой счетчик РС1 в нулевое состояние и закрывают приемник А2, делая его нечувствительным к сигналам на время работы передатчика.
По окончании работы передатчика приемник А2 открывается и приобретает нормальную чувствительность. Эхосигнал, отраженный от дна, принимается датчиком BQ1 и после усиления в приемнике закрывает ключ S1. Измерение закончено, и индикаторы счетчика РС1 высвечивают измеренную глубину. Очередной тактовый импульс вновь переводит счетчик РС1 в нулевое состояние, и процесс повторяется.

Принципиальная схема эхолота с пределом измерения глубины до 59,9 м изображена на рис. 2. Его передатчик представляет собой двухтактный генератор на транзисторах VT8, VT9 с настроенным на рабочую частоту трансформатором Т1. Необходимую для самовозбуждения генератора положительную обратную связь создают цепи R19C9 и R20C11.

Генератор формирует импульсы длительностью 40 мкс с радиочастотным заполнением. Работой передатчика управляет модулятор, состоящий из одновибратора на транзисторах VT11, VT12, формирующего модулирующий импульс длительностью 40 мкс, и усилителя на транзисторе VT10. Модулятор работает в ждущем режиме, запускающие тактовые импульсы поступают через конденсатор С14.

Приемник эхолота собран по схеме прямого усиления. Транзисторы VT1, VT2 усиливают принятый излучателем-датчиком BQ1 эхосигнал, транзистор VT3 использован а амплитудном детекторе, транзистор VT4 усиливает продетектированный сигнал. На транзисторах VT5, VT6 собран одновибратор, обеспечивающий постоянство параметров выходных импульсов и порога чувствительности приемника. От импульса передатчика приемник защищают диодный ограничитель (VD1, VD2) и резистор R1. В приемнике применено принудительное выключение одновибратора приемника с помощью транзистора VT7. На его базу через диод VD3 поступает положительный тактовый импульс и заряжает конденсатор С8. Открываясь, транзистор VT7 соединяет базу транзистора VT5 одновибратора приемника с положительным проводом питания, предотвращая тем самым возможность его срабатывания от приходящих импульсов. По окончании тактового импульса конденсатор С8 разряжается через резистор R18, транзистор VT7 постепенно закрывается, и одновибратор приемника обретает нормальную чувствительность. Цифровая часть эхолота собрана на микросхемах DD1-DD4. В ее состав входит ключ на элементе DD1.1, управляемый RS-триггером на элементах DD1.3, DD1.4. Импульс начала счета поступает на триггер от модулятора передатчика через транзистор VT16, окончания — с выхода приемника через транзистор VT15. Генератор импульсов с образцовой частотой повторения (7500 Гц) собран на элементе DD1.2. Из резистора R33 и катушки L1 составлена цепь отрицательной обратной связи, выводящей элемент на линейный участок характеристики. Это создает условия для самовозбуждения на частоте, определяемой параметрами контура L1C18. Точно на заданную частоту генератор настраивают подстроечником катушки. Сигнал образцовой частоты через ключ поступает на трехразрядный счетчик DD2-DD4. В нулевое состояние его устанавливает фронт тактового импульса, поступающего через диод VD4 на входы R микросхем. Тактовый генератор, управляющий работой эхолота, собран на транзисторах разной структуры VT13, VT14. Частота следования импульсов определена постоянной времени цепи R28C15. Катоды индикаторов HG1-HG3 питает генератор на транзисторах VT17, VT18 [2]. Кнопка SB1 («Контроль») служит для проверки работоспособности устройства. При нажатии на нее на ключ VT15 поступает закрывающий импульс и индикаторы эхолота высвечивают случайное число. Через некоторое время тактовый импульс переключает счетчик, и индикаторы должны высветить число 888, что свидетельствует об исправности эхолота.

Эхолот смонтирован в коробке, склеенной из ударопрочного полистирола. Большинство деталей размещено на трех печатных платах из фольгированного стеклотекстолита толщиной 1,5 мм. На одной из них (рис. 3) смонтирован передатчик, на другой (рис. 4) — приемник, на третьей (рис. 5 — цифровая часть эхолота. Платы закреплены на дюралюминиевой пластине размерами 172Х72 мм, вложенной в крышку коробки. В пластине и крышке просверлены отверстия под выключатель питания Q1 (МТ-1), кнопку SB1 (КМ1-1) и гнездо ВР-74-Ф коаксиального разъема XI, а также вырезано окно для цифровых индикаторов.
В эхолоте применены резисторы МЛТ, конденсаторы КЛС, КТК и К53-1. Транзисторы КТ312В и ГТ402И можно заменить на любые другие транзисторы этих серий, МП42Б — на МП25, КТ315Г-на КТ315В. Микросхемы серии К176 заменимы соответствующими аналогами серии К561, вместо микросхемы К176ИЕЗ (DD4) можно применить К176ИЕ4. Если эхолот будет использован на глубине не более 10 м, счетчик DD4 и индикатор HG3 можно не устанавливать. Обмотки трансформатора Т1 намотаны проводом ПЭЛШО 0,15 на каркасе диаметром 8 мм с фер-ритовым (600НН) подстроечником диаметром 6 мм. Длина намотки — 20 мм. Обмотка I содержит 80 витков с отводом от середины, обмотка II — 160 витков. Трансформатор Т2 выполнен на ферритовом (3000НМ) кольце типоразмера К16Х10Х4,5. Обмотка I содержит 2Х 180 витков провода ПЭВ-2, 0,12, обмотка 11-16 витков провода ПЭВ-2, 0,39. Катушка L1 (1500 витков провода ПЭВ-2 0,07) намотана между щечками на каркасе диаметром 6 мм из органического стекла. Диаметр щечек — 15, расстояние между ними — 9 мм. Подстроечник — от броневого магнитопровода СБ-1а из карбонильного железа.
Ультразвуковой излучатель-датчик эхолота изготовляют на основе круглой пластины диаметром 40 и толщиной 10 мм из титаната бария. К ее посеребренным плоскостям сплавом Вуда припаивают тонкие (диаметром 0,2 мм) проводники-выводы. Датчик собирают в алюминиевом стакане от оксидного конденсатора диаметром 45…50 мм (высоту — 23…25 мм — уточняют при сборке). В центре дна стакана сверлят отверстие под штуцер, через который будет входить коаксиальный кабель (РК-75-4-16, длина 1…2,5 м), соединяющий датчик с эхолотом. Пластину датчика приклеивают клеем 88-Н к диску из мягкой микропористой резины толщиной 10 мм.
При монтаже оплетку кабеля припаивают к штуцеру, центральный проводник — к выводу обкладки датчика, приклеенной к резиновому диску, вывод другой обкладки — к оплетке кабеля. После этого диск с пластиной вдвигают в стакан, пропуская кабель в отверстие штуцера, и закрепляют штуцер гайкой. Поверхность тита-натовой пластины должна быть углублена в стакан на 2 мм ниже его кромки. Стакан закрепляют строго вертикально и заливают до края эпоксидной смолой. После затвердевания смолы поверхность датчика шлифуют мелкозернистой наждачной бумагой до получения гладкой плоскости. К свободному концу кабеля припаивают ответную часть разъема XI. Для налаживания эхолота необходимы осциллограф, цифровой частотомер и блок питания напряжением 9 В. Включив питание, проверяют работоспособность счетного устройства: если оно исправно, то индикаторы должны высвечивать число 88,8. При нажатии на кнопку SB1 должно появляться случайное число, которое с приходом очередного тактового импульса должно вновь сменяться числом 88,8. Далее налаживают передатчик. Для этого к эхолоту подключают датчик, а осциллограф, работающий в режиме ждущей развертки,- к обмотке 11 трансформатора Т1. На экране осциллографа с приходом каждого тактового импульса должен появляться импульс с радиочастотным заполнением. Подстроечником трансформатора Т1 (если необходимо, подбирают конденсатор С10) добиваются максимальной амплитуды импульса, которая должна быть не менее 70 В. Следующий этап — налаживание генератора импульсов образцовой частоты. Для этого частотомер через резистор сопротивлением 5,1 кОм присоединяют к выводу 4 микросхемы DD1. На частоту 7500 Гц генератор настраивают подстроечником катушки L1. Если при этом подстроечник занимает положение, далекое от среднего, подбирают конденсатор С18. Приемник (а также модулятор) лучше всего настраивать по эхо-сигналам, как это описано в [I]. Для этого датчик прикрепляют резиновым жгутом к торцевой стенке пластмассовой коробки размерами 300Х100Х100 мм (с целью устранения воздушного зазора между датчиком и стенкой ее смазывают техническим вазелином). Затем коробку заполняют водой, выпаивают из приемника диод VD3 и присоединяют к выходу приемника осциллограф. Критерием правильной настройки приемника, модулятора передатчика, а также качества ультразвукового датчика является число наблюдаемых на экране эхосигналов, возникающих вследствие многократных отражений ультразвукового импульса от торцевых стенок коробки. Для увеличения видимого числа импульсов подбирают резисторы R2 и R7 в приемнике, конденсатор С13 в модуляторе передатчика и изменяют положение подстроечника трансформатора Т1. Для регулировки устройства задержки включения приемника впаивают на место диод VD3, заменяют резистор R18 переменным (сопротивлением 10 кОм) и с его помощью добиваются исчезновения двух первых эхосигналов на экране осциллографа. Измерив сопротивление введенной части переменного резистора, его заменяют постоянным такого же сопротивления. После настройки число эхосигналов на экране осциллографа должно быть не менее 20. Для измерения глубины водоема датчик лучше всего закрепить на поплавке с таким расчетом, чтобы нижняя его часть была погружена в воду на 10…20 мм. Можно прикрепить датчик к шесту, с помощью которого его погружают в воду кратковременно, на время измерения глубины. При использовании эхолота в плоскодонной алюминиевой лодке для измерения небольших глубин (до 2 м) датчик можно приклеить к днищу внутри лодки. В заключение следует отметить, что в солнечные дни яркость свечения цифровых индикаторов может оказаться недостаточной. Повысить ее можно заменой батареи «Корунд» («Крона») источником питания с несколько большим напряжением, например, батареи, составленной из восьми аккумуляторов Д-0,25 (никаких изменений схемы и конструкции прибора это не потребует).
В. ВОЙЦЕХОВИЧ, В. ФЕДОРОВА г. Ленинград
1. Бокитько В., Бокитько Д. Портативный эхолот.- Радио. 1981. № 10, с. 23-25.
2. Виноградов Ю. Преобразователь для питания индикаторов.- Радио, 1984, № 4. с. 55.
Что такое глубиномер для рыбалки?
 Основным залогом успеха на любом водоеме является то, насколько правильно и тщательно рыболов определит глубину в месте ловли. От этого зависит грамотный выбор конкретной точки для заброса оснастки, ее особенности и прочие технические нюансы, влияющие на результативность ужения. Издавна для этих целей применялся глубиномер для рыбалки, позволяющий решить поставленную задачу.
Основным залогом успеха на любом водоеме является то, насколько правильно и тщательно рыболов определит глубину в месте ловли. От этого зависит грамотный выбор конкретной точки для заброса оснастки, ее особенности и прочие технические нюансы, влияющие на результативность ужения. Издавна для этих целей применялся глубиномер для рыбалки, позволяющий решить поставленную задачу.
Устройства для определения глубины и рельефа дна используются круглый год. Их применяют со льда либо по открытой воде, с ними можно проводить измерения, находясь в лодке или на берегу. Различные варианты глубиномеров позволяют рыболову выбрать оптимальную модификацию под конкретную ситуацию и собственные предпочтения, чтобы в процессе ловли ощущать себя максимально комфортно и непринужденно.
Какими бывают глубиномеры?
Глубиномер – устройство, предназначенное для измерения глубины и изменения рельефа дна в заданной акватории. С его помощью можно обнаружить различные аномальные зоны на участке ловли и определить самые потенциально перспективные точки, куда стоит послать оснастку. Он помогает найти свалы, канавки, возвышенности, локальные бугорки, приямки и прочие характерные места стоянки рыбы.
Глубиномеры для рыбалки можно смастерить самому либо приобрести в магазине. Самодельное изделие дешево, просто и надежно. Заводское дороже, но не придется тратить время на его изготовление. Самый современный прибор для измерения глубины – эхолот. Сегодня именно он пользуется наибольшим спросом и применяется многими рыбаками.
Глубиномер своими руками
Самым простым решением приобрести глубиномер для рыбной ловли является изготовление его самостоятельно в домашних условиях. Это устройство легко сделать из подручных материалов. Сегодня среди рыболовов распространены следующие типы этих приспособлений:
- из свинцовой груши;
- с поплавком-маркером;
- из свинца и резины;
- из пенопласта и свинцового грузила.
Ниже рассмотрим некоторые варианты изготовления глубиномера своими руками, их преимущества и особенности.
С поплавком-маркером
Простая и надежная конструкция глубиномера, которая к тому же является весьма эффективной на разных малознакомых водоемах. Пошаговая инструкция ее изготовления выглядит так:
- Берется пенопластовый шарик либо круглый поплавок грузоподъемности порядка 15–20 грамм.
-
На леску с помощью вертлюжка цепляется грузило необходимого веса. Во многих случаях достаточно 50–60 граммов.
Фото 1. Две унции равны примерно 56 граммам.
Все. Глубиномер готов. Теперь можно приступать к измерениям глубины в месте ловли и определению рельефа дна:
-
Для начала на бланке удилища следует нанести какую-либо отметку для измерений. От ролика лесоукладывателя отмеряется 50 см и вокруг бланка несколько раз обматывается изолента.
Фото 2. Маркировка изолентой.
- Определив значение глубины в первой точке, подматываем катушкой леску и сдвигаем груз на один-два метра, повторяя процедуру измерений.
Таким образом, «прозваниваем» все направление до берега. После выполняем забросы под разными углами и измеряем глубину. В течение получаса можно досконально изучить рельеф в зоне ловли и определить потенциально уловистые точки.
Из пенопласта и свинцового грузила
Этот вариант также предназначен для измерения с берега, по принципу действия схож с первым устройством. Изготовить его можно так:
- Берем кусок пенопласта прямоугольной или квадратной формы. В нем проделываем сопрягающиеся два отверстия, расположенные под углом 40–50 градусов к горизонтальной оси.
- В отверстие вставляем использованный стержень от простой шариковой ручки.
- Леска для измерения глубины пропускается через стержень.
- К ее свободному концу крепится свинцовый груз необходимого веса напрямую либо с помощью вертлюжка.
Этот глубиномер позволяет весьма точно измерять глубину на стоячих водоемах. На реках с течением получаем значения с некоторой погрешностью.
Из свинца и резины
Этот глубиномер предназначен не столько для промера участка ловли, сколько для определения максимально привлекательного для рыбы нахождения приманки. Применяется в поплавочной или штекерной рыбалке, когда необходимо насадку приподнять над пятном прикормки на 3–5 см, сделав ее заметнее и аппетитнее для рыбы. Выглядит и изготавливается следующим образом:
- На крючок цепляем прямоугольный кусочек резины.
- На его другом крае фиксируем свинцовый груз весом, способным утопить применяемый поплавок.
Этот простейший глубиномер позволяет быстро настроить оснастку, и расположить приманку на оптимальном расстоянии от дна.
Фото 3. Вариант: силикон и джиг головка. Крючок цепляем за силикон.
Современный глубиномер – эхолот
Из современных приборов, предназначенных для измерения глубины и прорисовки рельефа дна, рыболовами применяется эхолот. Это устройство позволяет не просто узнать цифры, но и визуально увидеть, что происходит под водой в конкретном месте.
Существует эхолот для ловли с берега и с лодки. Вторая категория наиболее востребована и пользуется огромным спросом. Первая – малознакома нашим рыболовам. Ее применяют единицы, хотя этот прибор очень эффективен и позволяет изучить ситуацию под водой, находясь вне плавсредства.
Как выбрать эхолот для рыбалки с берега? Вопрос непростой. Изначально необходимо обращать внимание на цену изделия. Ведь слишком дорогие модели не по карману простому обывателю, да и порой соотношение в необходимости прибора и его стоимости не сопоставимы.
Чтобы выбрать хороший береговой эхолот, необходимо обращать внимание на следующие параметры:
- Мощность, позволяющая измерять глубину на большом расстоянии. Небольшое значение этого показателя приводит к тому, что прибор передает картинку на дисплей, находясь лишь вблизи рыболова.
- Угол сканирования. Чем он больше, тем большую площадь «захватывает» датчик эхолота. Но чересчур высокое значение может привести к искажению изображения. Рекомендуется выбирать устройство с усредненными характеристиками.
- Размер, разрешение экрана эхолокатора и количество цветов. Этот показатель определяет качество изображения рельефа дна на дисплее.
Помимо эхолота, некоторые производители выпускают цифровые глубиномеры. Они дешевле эхолокаторов, но позволяют измерить глубину, дополнительно отображают температуру воды либо воздуха. Их можно использовать в зимнее время, сканируя зону ловли прямо через лед.